
Project RadarHD: High Resolution Point Clouds from mmWave Radar
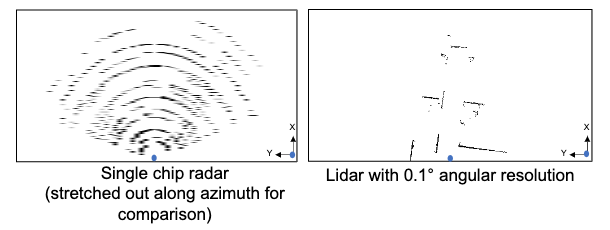
This paper explores a machine learning approach on data from a single-chip mmWave radar for generating high resolution point clouds -- a key sensing primitive for robotic applications such as mapping, odometry and localization. Unlike lidar and vision-based systems, mmWave radar can operate in harsh environments and see through occlusions like smoke, fog, and dust. Unfortunately, current mmWave processing techniques offer poor spatial resolution compared to lidar point clouds. This paper presents RadarHD, an end-to-end neural network that constructs lidar-like point clouds from low resolution radar input. Enhancing radar images is challenging due to the presence of specular and spurious reflections. Radar data also doesn't map well to traditional image processing techniques due to the signal's sinc-like spreading pattern. We overcome these challenges by training RadarHD on a large volume of raw I/Q radar data paired with lidar point clouds across diverse indoor settings. Our experiments show the ability to generate rich point clouds even in scenes unobserved during training and in the presence of heavy smoke occlusion.
Code
The code for RadarHD is available at: LINK
Citation
- High Resolution Point Clouds from mmWave Radar, Akarsh Prabhakara, Tao Jin, Arnav Das, Gantavya Bhatt, Lilly Kumari, Elahe Soltanaghai, Jeff Bilmes, Swarun Kumar and Anthony Rowe, ICRA 2023 PAPER