
Project WSR: A WiFi-Based Relative Bearing Sensor for Robotics
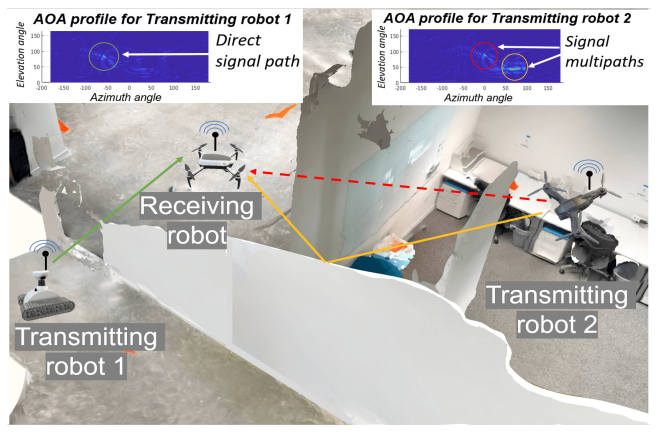
This paper presents the WiFi-Sensor-for-Robotics (WSR) toolbox, an open source C++ framework. It enables robots in a team to obtain relative bearing to each other, even in non-line-of-sight (NLOS) settings which is a very challenging problem in robotics. It does so by analyzing the phase of their communicated WiFi signals as the robots traverse the environment. This capability, based on the theory developed in our prior works, is made available for the first time as an opensource tool.
Citation
- Toolbox Release: A WiFi-Based Relative Bearing Sensor for Robotics, Ninad Jadhav, Weiying Wang, Diana Zhang, Swarun Kumar and Stephanie Gil, IROS 2022 PAPER